Physical AI for Collaborative Beam Lifting
We have submitted our latest results to the ICRA 2026 Workshop on Field Robotics, presenting a prototype of Physical AI for collaborative robotics.
The work demonstrates cooperative beam lifting by two mobile manipulators, controlled by AI policies trained in simulation and executed in a decentralized way on real robots at Fraunhofer IPK in Berlin.
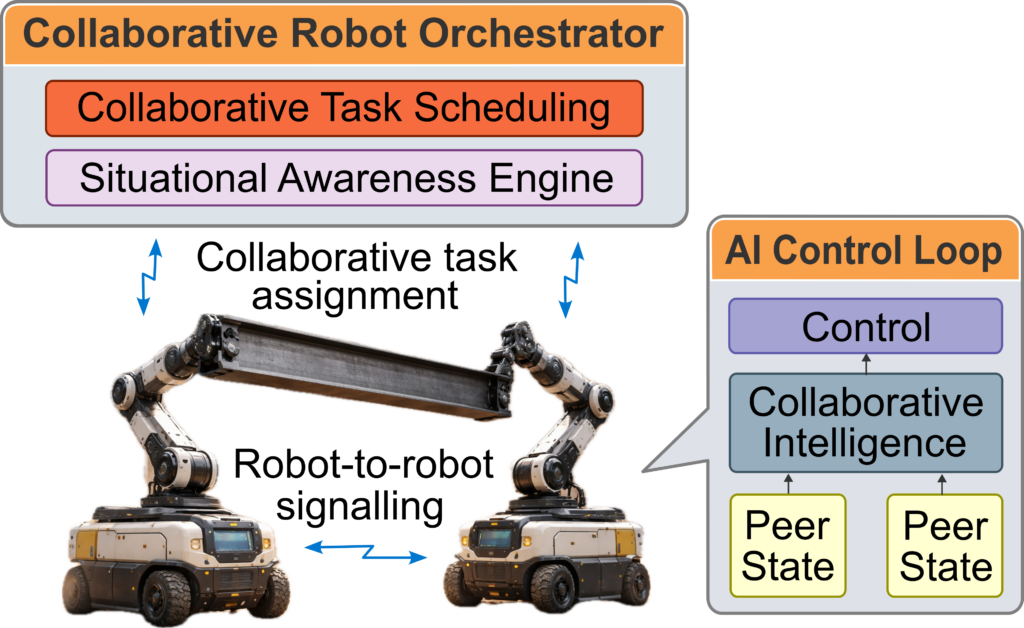
System architecture with Collaborative Robot Orchestrator and AI Control Loop at the the Robot Orchestrator.
The demonstration is complimented by simulations with key results:
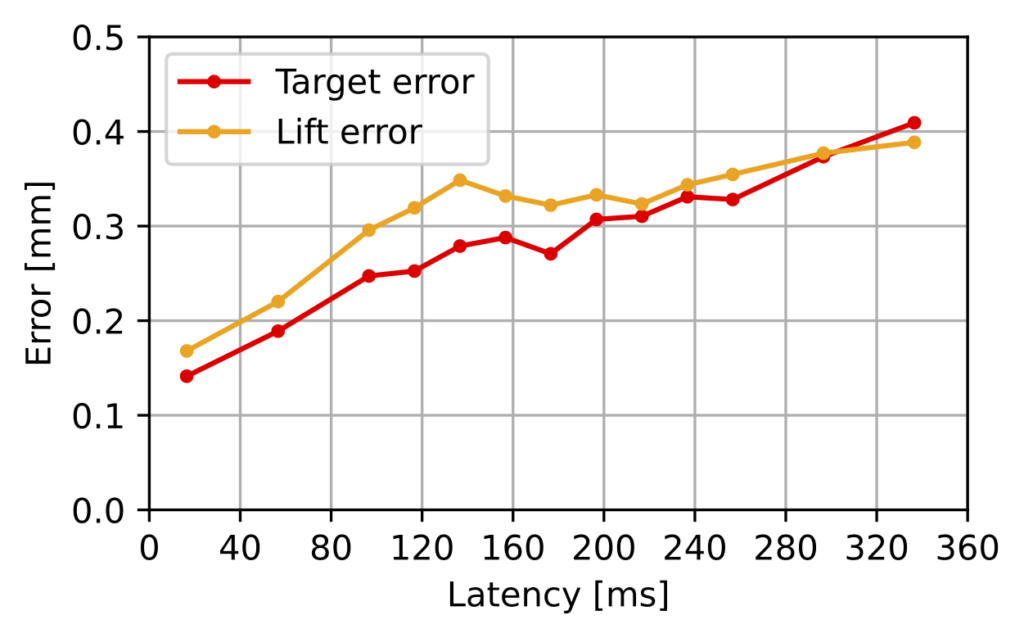
• 100% task success across all tested latency levels
• Up to 9.5× increase in synchronization time under high communication delay
• Maintained millimeter-level accuracy (≈2 mm) despite network constraints
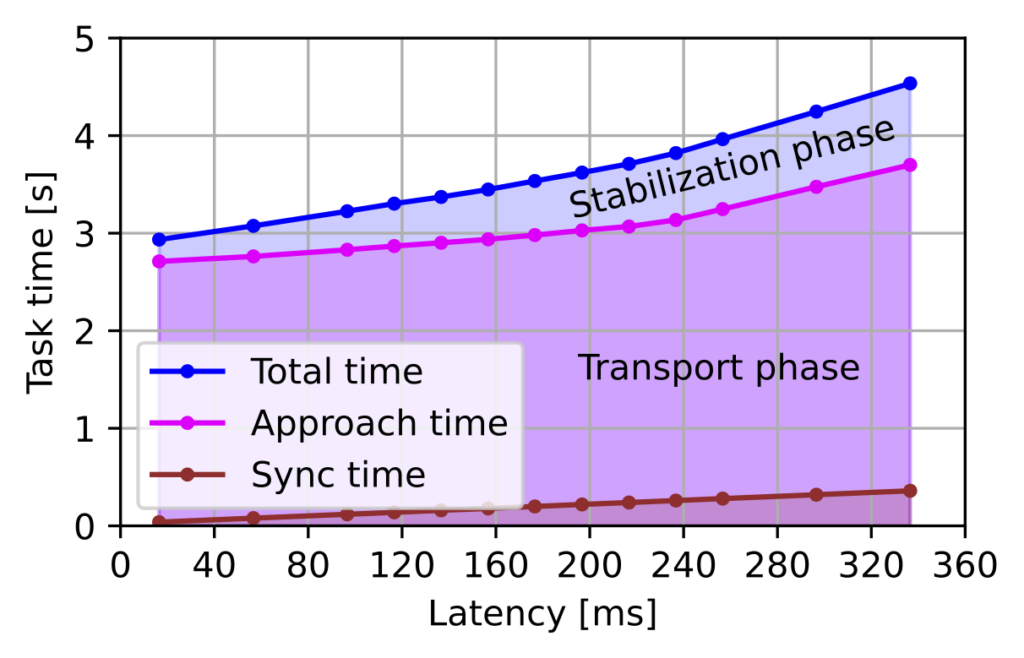
The study highlights a key challenge for multi-robot systems:
communication latency directly impacts coordination performance, even when tasks remain feasible.
This work is a first step toward our vision of robot collectives operating reliably under real network conditions, where connectivity becomes part of the control loop rather than an external constraint.