Towards QoS-Aware Multi-Robot Collaboration over 5G/6G
We are conducting early-stage research on a ROS 2-based Collaborative Robot Orchestrator (CRO), exploring new approaches to coordinating collaborative tasks among multiple robots.
In this conceptual framework, the CRO investigates how a shared collaborative task can be assigned to a group of robots via wireless connectivity, including 5G and prospective 6G systems. After task assignment, robots may engage in direct inter-robot communication, potentially using the same wireless infrastructure to support coordination during task execution.
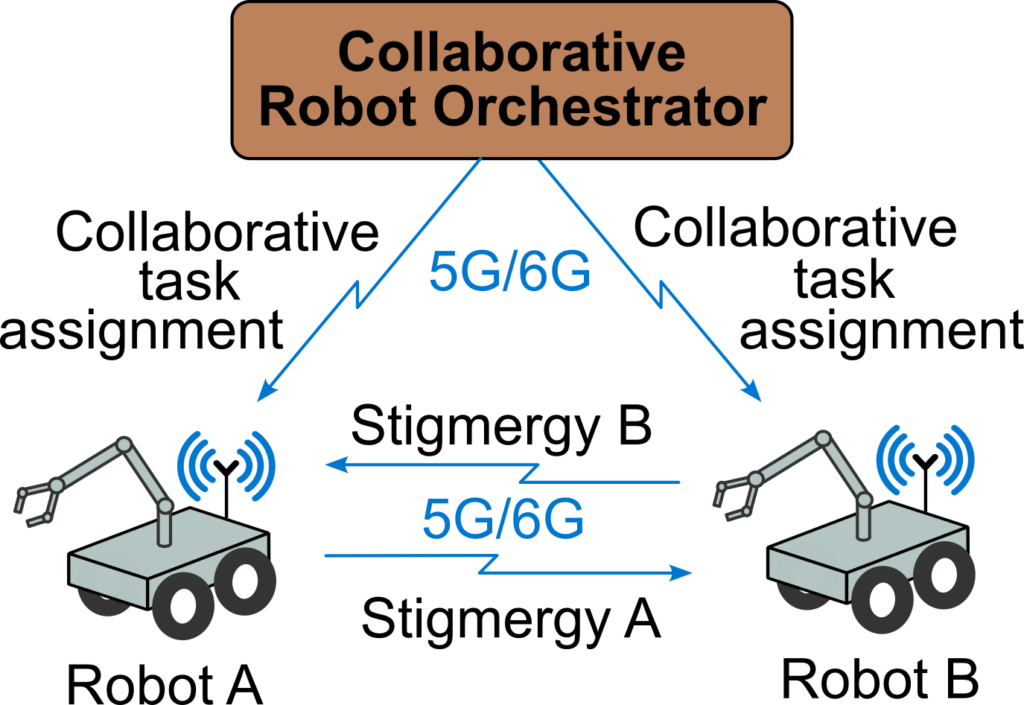
Conceptual illustration of collaborative task assignment in a multi-robot system. This figure represents an early-stage research direction and does not depict a finalized system or validated implementation.
A central research topic is the study of task-related environmental and coordination information exchange, inspired by the concept of stigmergy, to support decentralised collaboration. These mechanisms are currently examined at a conceptual and exploratory experimental level, without assuming predefined protocols, performance guarantees, or scalability properties.
Overall, our work focuses on foundational architectural questions, including how orchestration logic, robot-to-robot interaction, and wireless network capabilities could be co-designed, and which limitations and trade-offs emerge when quality-of-service (QoS) awareness is introduced into multi-robot collaboration.