Multi-Robot Physical AI for Modular Construction
Increasing productivity, improving precision placement, and enabling new collaborative construction operations that have not previously been feasible at scale — this is the objective of our work at ENKI AI.
We are advancing a new approach to collaborative robotics in modular construction by integrating collaborative multi-robot scheduling, real-time network control and embedded AI into robotic manipulation. Our focus is on enabling stable, force-aware multi-robot coordination under variable wireless conditions, addressing synchronisation challenges that affect safety, precision and scalability on construction sites.
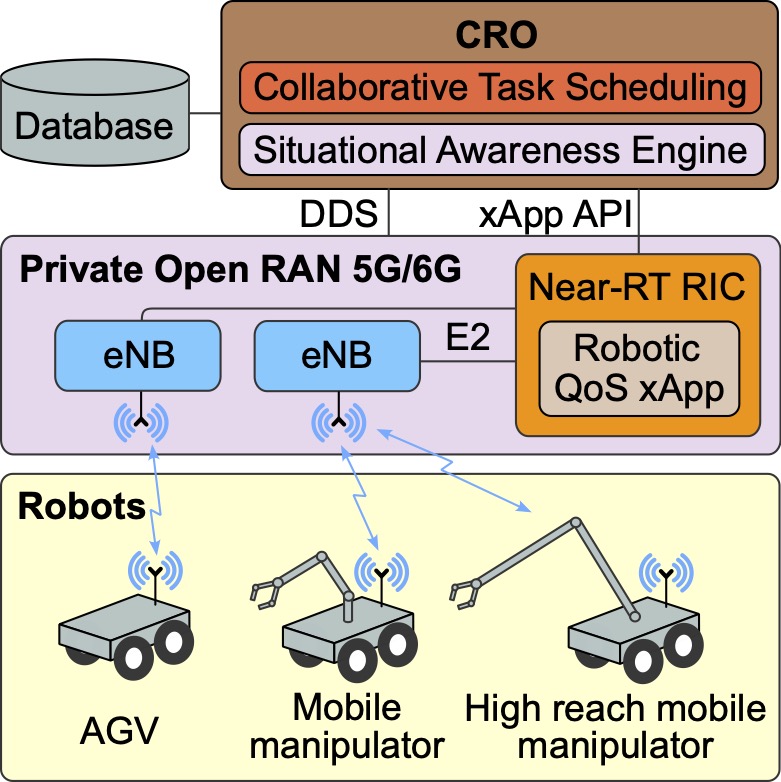
The new architecture integrates: Collaborative Robot Orchestration (CRO) for multi-robot task scheduling, a Private Open RAN 5G/6G providing low latency wireless communication with Quality of Service (QoS) enforcement, and Embedded Collaborative AI
on each robot enabling adaptive motion and force-aware control.